
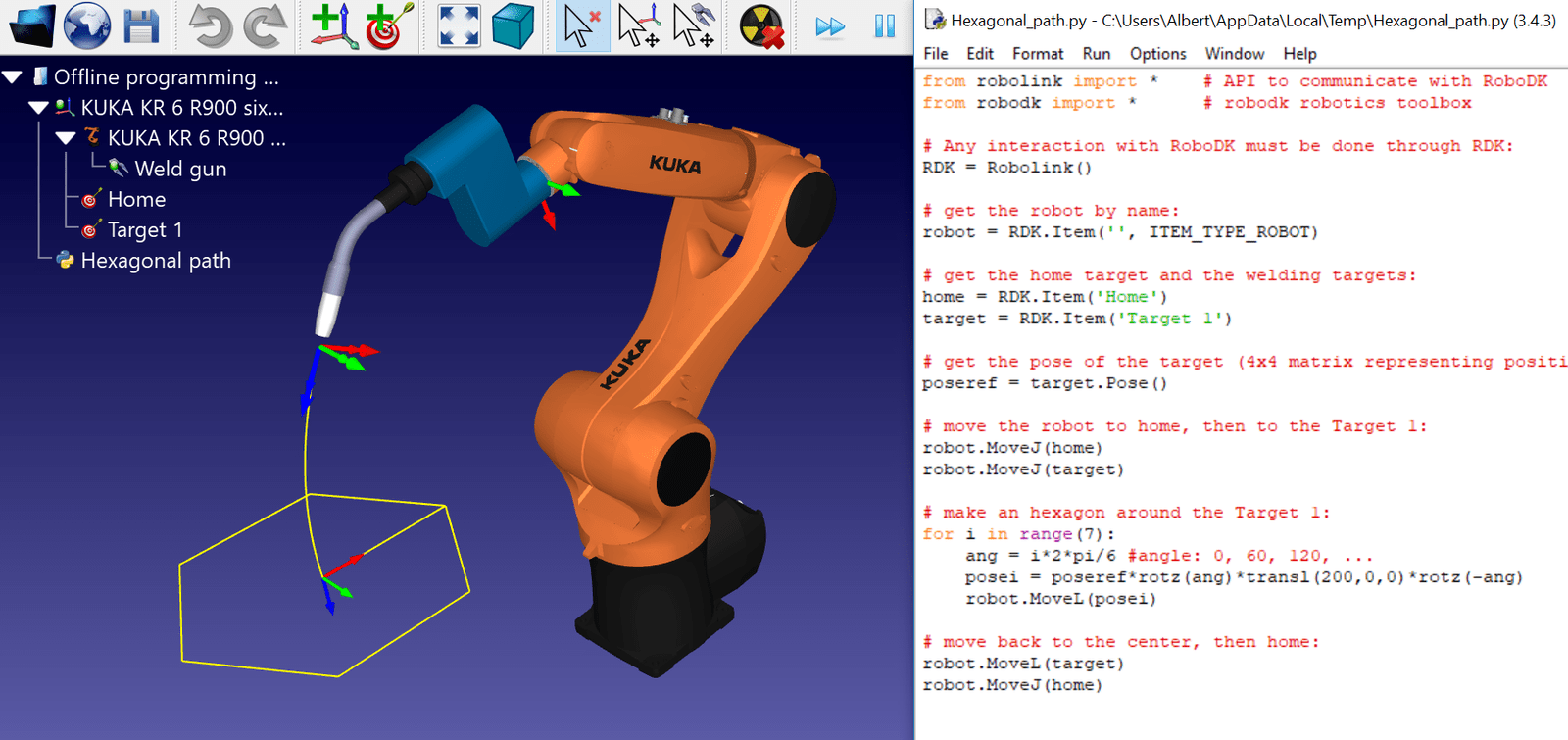
What is Offline Robotic Programming?

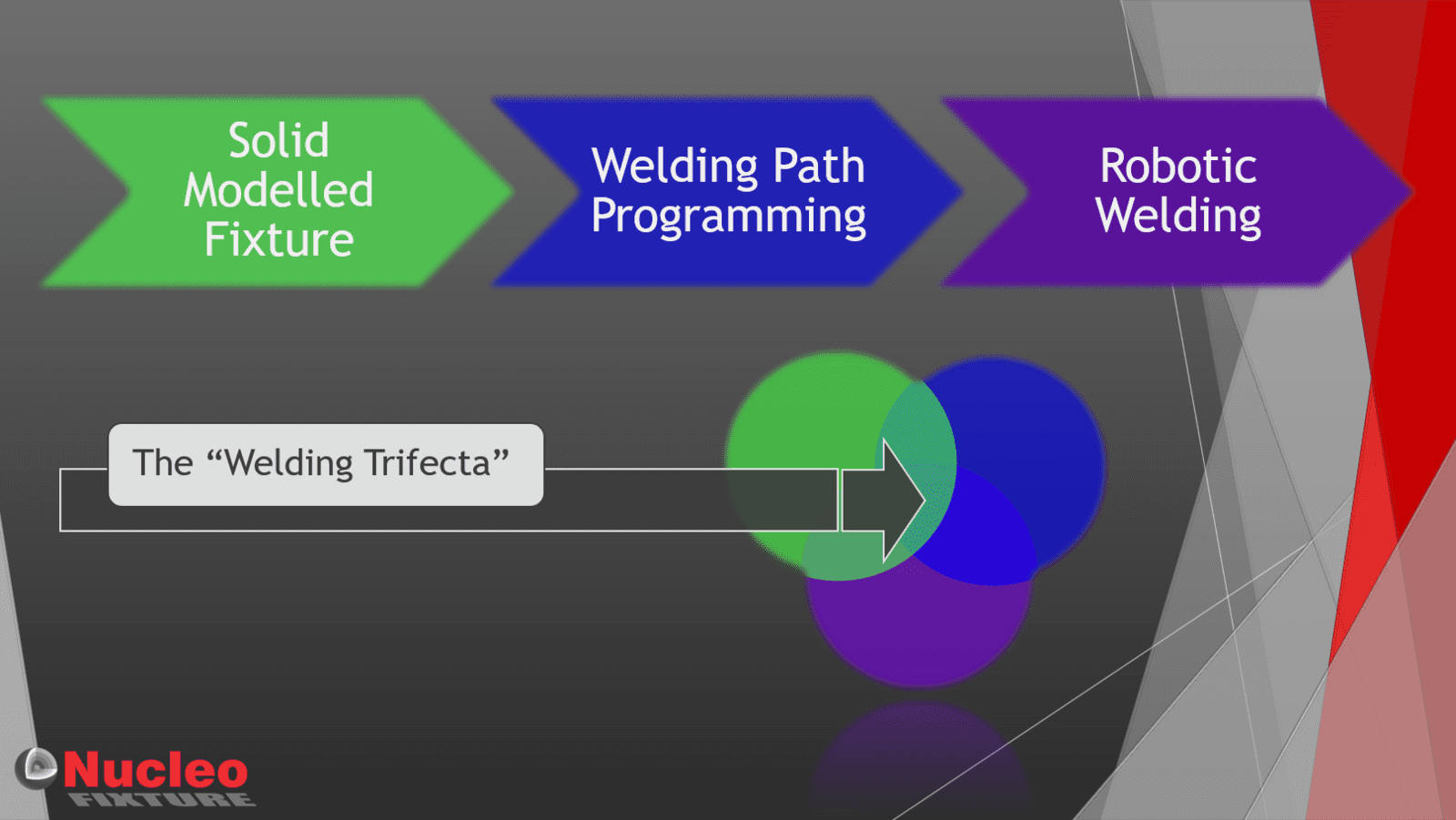
Attaining the "Welding Trifecta"

Nucleo Fixture is a natural partner for welding, both manual and robotic. The financial benefits are maximized when rapid fixture design plus offline robotic programing is adopted. This results in the "Welding Trifecta", as shown in the animation below.
How do you maximize welding output?
We call it the "Welding Trifecta"
Adopt the latest technologies to get ahead
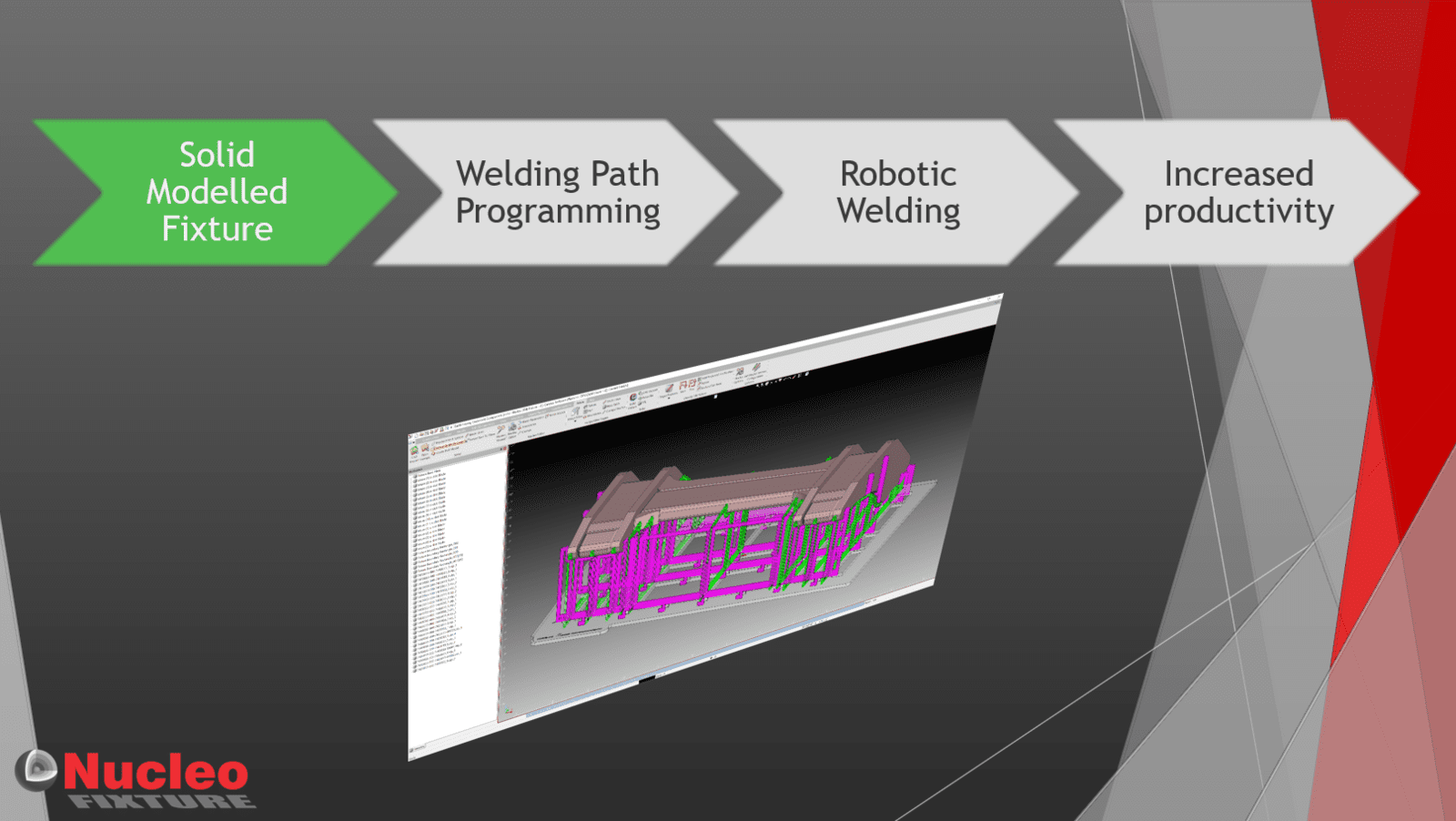
Generate a fixture from a Solid Model
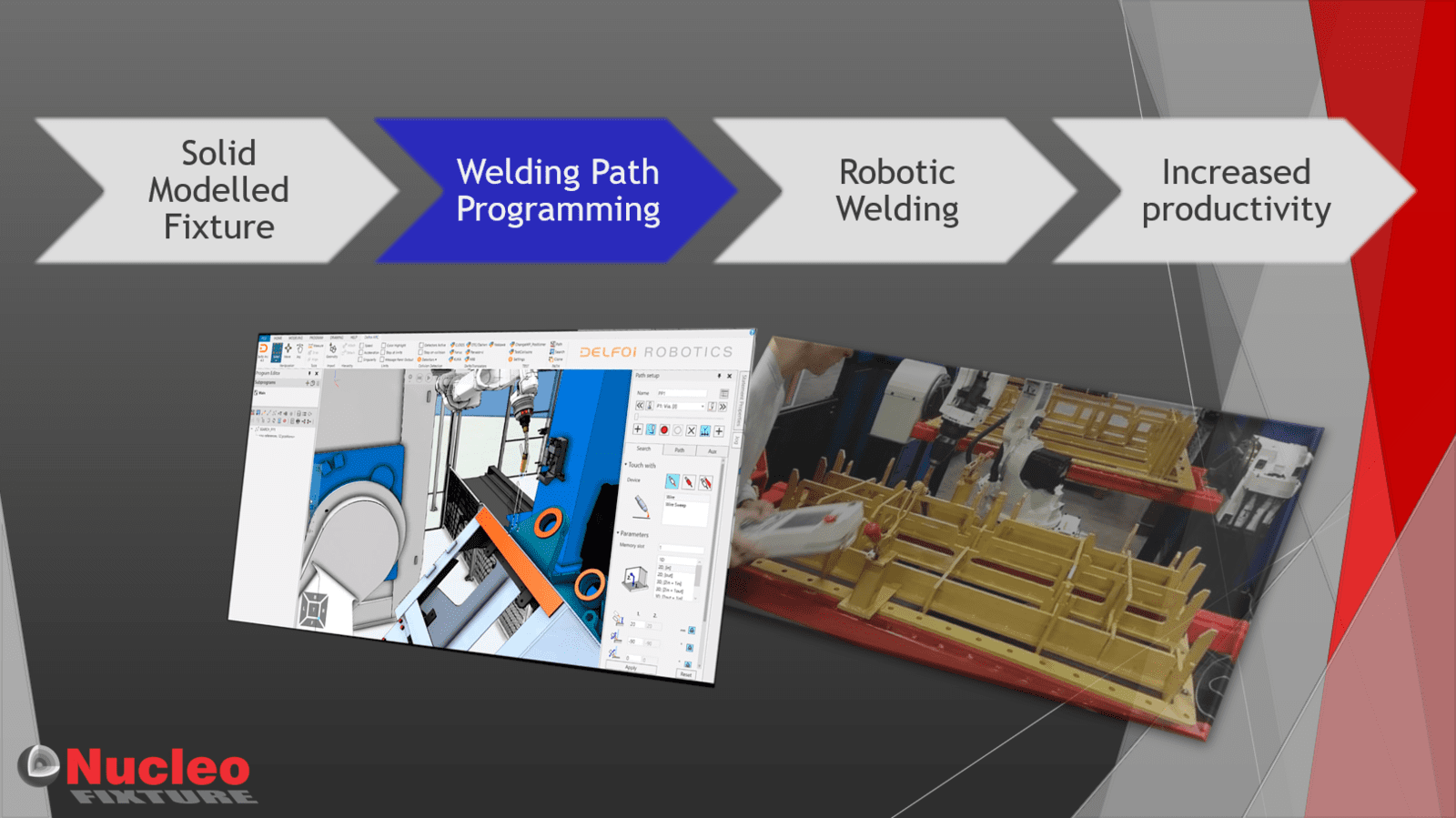
Program virtually, offline, or use the robot pendant
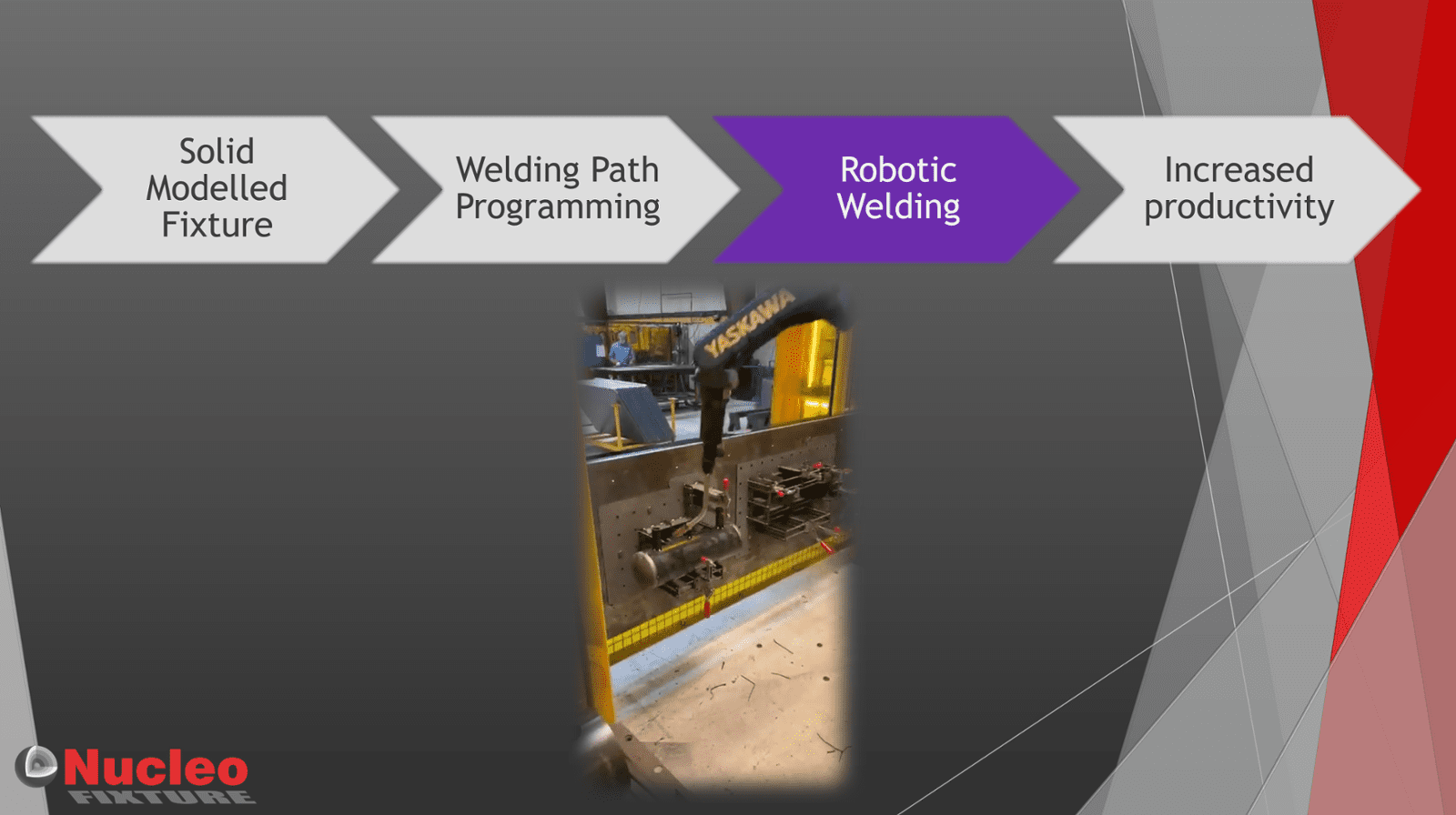
Quickly pick up the part in the fixture on the robot table & press cycle-start
Net result = higher productivity and profits
